Aarts, E. and J. Korst, 1988. Simulated Annealing and Boltzmann Machines: A Stochastic Approach to Combinatorial Optimization and Neural Computing. Wiley, New York, USA.
Research Journal of Applied Sciences, Engineering and Technology
A Metaheuristic-based Fuzzy Controller for Semi-active Control of Magnetorheological Dampers
Research Journal of Applied Sciences, Engineering and Technology 2020 17: 94-105
Cite This ArticleAbstract
Aim of this study is to propose a control strategy based on Simulated Annealing (SA) as a metaheuristic algorithm and Fuzzy Logic Controller (FLC) for semi-active nonlinear control of structures equipped with Magnetorheological (MR) dampers to prevent damage from severe dynamic loads such as earthquakes. MR dampers as promising semi-active control mechanisms are focus of attention for reducing seismic response of structures in the world of structural engineering. A fuzzy controller is applied to establish interactive relationships between structural responses and input voltages to the MR damper. A modified simulated annealing algorithm is employed as an evolutionary algorithm to design the fuzzy controller, which is herein described as a Modified Simulated Annealing-Fuzzy Logic Controller (MSA-FLC). Results of numerical simulations demonstrated the efficiency of the proposed smart strategy compared to similar methodologies recommended by other researchers.
Keywords:
Introduction
Mitigating damage induced by severe dynamic loads, such as earthquake and strong wind is the central issue in structural engineering. Semi-active control devices which offer the best features of both passive and active control systems including reliability, versatility and adaptability, have attracted considerable attention in recent years. One of such innovative and most promising semi-active control devices is the Magneto-Rheological (MR) damper which employs MR fluids to provide control capability.
Since an MR damper is a semi-active control device with highly nonlinear dynamics and civil infrastructures are also replete with nonlinearities and uncertainties, it is a challenging task to develop effective control strategies that are implementable and can fully utilize the capabilities of MR dampers. Esteki et al., (2015) innovatively proposed the idea of applying a magnetorheological fluid based semi-active tuned mass damper which actually integrates characteristics of tuned mass dampers with semi-active control system for obtaining a more efficient performance in suppressing vibration of tall buildings.
Various semi-active control algorithms have been proposed for use with the MR dampers in which, first, a conventional optimal control algorithm such as LQR/LQG (Dyke et al., 1996) is employed to calculate the ideal target force which is regarded as an active control force, using selected structural responses and then, through an active to semi-active converter (ASAC) unit, the desired control force produced by the controller is converted to a desired control force from an MR damper (Schurter and Roschke, 2000). Zhou et al., (2012) focused on the vibration control of long-span reticulated steel structures under multidimensional earthquake excitation. They adopted the LQR and Hrovat controlling algorithm to determine optimal MR damping force, while the Modified Bingham Model (MBM) and Inverse Neural Network (INN) were proposed to solve the real-time controlling current. Several algorithms, such as clipped-optimal control algorithm (Dyke et al., 1996) and neural networks Chang and Zhou (2002) and Zhou and Chang (2003) have been developed to effectively command voltage to an MR damper to generate a damping force that is much the same as the desired control force in the ASAC unit. Huang et al., (2015) conducted a full-scale experimental test to verify the effectiveness of the MR damper for mitigating cable vibration using a semi-active control strategy derived based on the universal design curve of dampers and a bilinear mechanical model of the MR damper. Sheikh et al., (2012) investigated analytically the efficiency of MR damper in reducing adverse seismic pounding effects of base-isolated multi-span RC highway bridges. In their study three control strategies including passive off, passive on and bang control were employed for controlling MR damper. However, there are difficulties such as, establishing an accurate mathematical model of a real structure in order to calculate the optimal control force under severe dynamic loads, handling the nonlinear dynamics of an MR damper and increased complexities that ASAC unit may introduce into the control system.
Fuzzy Logic Control (FLC) theory due to its inherent robustness and its ability in handling nonlinearities and uncertainties has attracted much of attention in the field of structural vibration control in recent years (Battaini et al., 1998; Symans and Kelly, 1999; Schurter and Roschke, 2001). Kim et al., (2009) applied a Semi-active Nonlinear Fuzzy Controller (SNFC) based on the Parallel Distributed Compensation (PDC) approach for vibration control of building structures equipped with a nonlinear semi-active device subjected to destructive environmental forces such as earthquake and strong wind loadings. Nevertheless, there are drawbacks in these FLC systems. The fuzzy sets and rules that require a full understanding of the system dynamics must be correctly pre-determined for the system to function properly. A number of approaches have been proposed for development, tuning and optimization of fuzzy models. Wang (1994) described an adaptive fuzzy control strategy that (Zhou et al., 2003) successfully applied for control of linear and nonlinear structures. They demonstrated that the adaptive feature of a fuzzy controller has multiple advantages in controlling a building equipped with an MR damper system. Yan and Zhou (2006) applied a Genetic Adaptive Fuzzy (GAF) controller for single and multiple damper cases. Makhmalbaf et al., (2011) modified a fuzzy controller optimized by Particle Swarm Optimization (PSO) technique for semi-active control of a 3-story benchmark building. Gu and Oyadiji (2008) proposed application of an Adaptive Neuro-Fuzzy Inference System (ANFIS) controller for reduction of environmentally induced vibration in Multiple-Degree-of-Freedom (MDOF) building structure with MR damper. Wilson (2012) evaluated the effects of multiple individually tuned fuzzy-controlled MR dampers in reducing responses of a multi-degree-of-freedom structure subjected to seismic motions. In the study conducted by Wilson (2012) two different fuzzy-control algorithms are considered, including a traditional controller in which all parameters are kept constant and a gain-scheduling control strategy.
Traditional local search methodologies or some mathematical classic techniques generally progress based on improving the response and toward decreasing cost function. But these approaches often converge to a solution in local minimum and miss absolute optimum. Simulated Annealing (SA) is a kind of stochastic method that is well known for its effective capability of escaping local optimum through “Hill up” strategy.
In this study, a Modified Simulated Annealing (MSA) algorithm is employed to determine optimum values of membership functions for fuzzy controller. The proposed controller described in this study as MSA-FLC has been applied for semi-active control of a 3-story test structure with shear and linear behavior equipped with a single MR damper in the first story and has the responsibility of generating a proper control signal for MR damper to mitigate destructive seismic-induced vibrations, efficiently. The proposed smart controller has been verified through numerical results presented and its efficiency has been demonstrated as well, through comparison of obtained results by that of similar tests conducted by other researchers.
Materials and Methods
This research works was conducted by authors in Iran during 2017-2019.
One of such innovative and most promising semi-active control devices is the Magneto-Rheological (MR) damper which employs MR fluids to provide control capability. Adequate modelling of the control devices is essential for sufficient prediction of behavior of the controlled system. Among mechanical models proposed for MR damper, modified Bouc-Wen mechanical model has been shown to accurately predict the behavior of a prototype shear-mode MR damper over a wide range of inputs in a set of experiments (Dyke et al., 1996). This model is also expected to be appropriate for modelling of a full-scale MR damper. Equations governing the force f produced by modified Bouc-Wen model are as below:
$ f = c_1\dot{y}\ +\ k_1(x\ -\ x_0) ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~(1)$
$ \dot{y}\ =\ \frac{1}{(c_0\ +\ c_1)}\ {{\alpha}z\ +\ c_0\dot{x}\ +\ k_0(x\ -\ y)} ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~(2)$
where the evolutionary variable z is given by (Wen, 1976):
$ \dot{z}=-\gamma\left|\dot{x}-\dot{y}\right|z\left|z\right|^{n-1}-\beta\left(\dot{x}-\dot{y}\right)\left|z\right|^n+A(\dot{x}-\dot{y}) ~~~~~~~~~~~~~~~~~~~~~~~~(3)$
where x is the displacement of the device and z is an evolutionary variable that accounts for the history dependence of the response (Wen, 1976). The accumulator stiffness is presented by $k_1$ and the viscous damping observed at large velocities by $c_0$. While, $c_1$ is a dashpot included in the model to introduce the nonlinear roll-off in the force-velocity loops observed in the experimental data at low velocities. $k_0$ is included to control the stiffness at large velocities and $x_0$ is the initial displacement of spring $k_1$ associated with the nominal damper force due to the accumulator. By adjusting the parameters of the model $\gamma$, $\beta$ and $A$, one can control the shape of the hysteretic loops for the yielding element (Dyke et al., 1996). To account for functional dependence of the device parameters on the voltage applied to the current driver and the resulting magnetic current, Spencer et al., (1997) have suggested below relations:
$ \alpha=\alpha\left(u\right)=\alpha_a+\alpha_bu ~~~~~~~~~~~~~~~~~~~~~~~~~~(4)$
$ c_1=c_1\left(u\right)=c_{1a}+c_{1b}u ~~~~~~~~~~~~~~~~~~~~~~~~(5)$
$ c_0=c_0\left(u\right)=c_{0a}+c_{0b}u ~~~~~~~~~~~~~~~~~~~~~~~~(6)$
Moreover, the current driver circuit of MR damper introduces dynamics into the system. These dynamics are typically considered to be a first-order time lag in the response of the device to changes in the command input. These dynamics are accounted for with the first-order filter on the control input given as below (Yoshida and Dyke, 2004):
$ \dot{u}=-\eta\left(u-\nu\right) ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~(7)$
where $\nu$ the commanded voltage sent to the current driver and $\eta$ is the time constant of this first-order filter.
Simulated Annealing Algorithm
The idea which forms the basis for Simulated Annealing (SA) algorithm was first published by Metropolis et al., (1953). They offered an algorithm for refrigerating materials in a heat bath. When a solid material is warmed up to its melting point and then is cooled till reaching to freezing state, structural characteristics of the frozen material depends on speed and manner of refrigeration process. 30 years later, Kirkpatrick et al., (1983) proposed application of this simulation for searching justified responses of an optimization problem with the objective of converging to an optimum solution. This approach is known as Simulated Annealing (SA) algorithm in which a set of justified solutions are searched by moving from current response toward an amount in the neighborhood of the solutions set. Traditional local search approaches generally develop on the basis of improving the response and progress toward decreasing cost function. But these approaches often converge to a response in local minimum and miss absolute optimum. In contrast, meta-heuristic strategies, such as SA algorithm escape local optima by allowing hill-climbing moves, i.e., moves which worsen the objective function value, in the hope of finding a global optimum (Henderson et al., 2003). However, since the objective is obtaining absolute minimum, these upward movements have to be controlled. For this purpose, the frequencies of these movements are determined using a possibility function which changes with the progress of the algorithm. SA algorithm can be applied to address discrete and, to a lesser extent, continuous optimization problems (Henderson et al., 2003). For discrete optimization purposes, one can mention TSP (Shakouri et al., 2009), as well as 0/1 Knapsack problems (Liu et al., 2006), among others. This algorithm has also been utilized in continuous problems and solving test functions (Siarry et al., 1997; Ventresca and Tizhoosh, 2007; Yuen and Chow, 2008).
Provided metals during melting process go through the refrigeration process gradually while their temperatures decrease with time according to a particular curve, resultant crystal networks are set at the minimum energy level. SA algorithm inspired by gradual refrigeration phenomenon of metals, searches for absolute minimum in different problems. In this algorithm, temperature parameter determines capability of displacing network elements in inter-molecular space and during the search process of the algorithm decreases based on a specific schedule. Should material’s temperature decrease according to below relation, the consequent crystal network converges to absolute minimum (Aarts and Korst, 1988):
$ T_k=\frac{T_0}{1+\log(k)} ~~~~~~~~~~~~~~~~~~~~~~~~(8)$
$T_0$ : initial temperature
$T_k$ : temperature in each step
$K$ : step of iteration
At high temperatures, molecules displace more rapidly and with decreasing temperature, they become more limited and displace slower. This fact indicates that at the initial stage of SA algorithm which temperature is high, variables can change more while at the end stage of the algorithm in which temperature decreases, change of variables become more limited. In continuous problems, production of new variables is based on the neighborhood radius and previous variables and is accomplish by being affected by a random amount. During the search process of the algorithm and in low temperatures, neighborhood radius should shrink while temperature decreases so that molecules become more restricted in relation to the crystal network. Indeed, reducing the neighborhood radius controls the range of changes of the variables. In this algorithm acceptance condition of new variables is according to below distribution function:
$ P(x_i\rightarrow x_{i+1})\ =\ \left\{ \begin{matrix} e^\frac {-∆E(x_i)}{kT_i} & ΔE(x_i) ≥ 0\cr 1 & ∆E(x_i) \lt 0 \end{matrix} \right\} ~~~~~~~~~~~~~~~~~~~~~~~~(9)$
$ ΔE(x_i)\ =\ E(x_{i+1})\ -\ E(x_i) ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~(10)$
The advantage of SA algorithm is that stochastically accepts responses with worse objective functions as well as variables which produce proper responses. Owing to the fact that the objective is minimization, should the amount of energy be improved, i.e., the new energy level, $E(x_{i+1})$, is lower than that of previous one, $E(x_i)$, the related variable is accepted. However, SA algorithm, through hill-up ability, can also accept variables with the possibility of “$Exp((-∆E (x_i))/(kT_i))$”, when the response deteriorates or in other words new energy amount increases. This ability causes the algorithm to escape local optima. In this algorithm, the possibility of accepting a false state is compared to a random amount in the range of $[\begin{matrix}0&1\\\end{matrix}]$. Thus, the greater the temperature, the more acceptances are gained and with decreasing the temperature the possibility of accepting false states is reduced. When the temperature touches 0, only best movements are accepted.
Modified Simulated Annealing (MSA) Algorithm
In literature, basic concepts of optimization have been determined quantitatively and researchers have preferred to modify and define algorithms to acquire maximum speed and accuracy. In SA approach, temperature is the controlling parameter of the algorithm and reveals the state of problem in the stages of refrigeration process simulation. In fact, a high temperature indicates that a considerable change in cost function can occur and moving in the search space with large steps or along positive tangent of objective function is possible. In this research a Modified Simulated Annealing (MSA) algorithm based on optimum initial temperature, acceptance ratio and dynamic Markov chain is proposed in which the final search stage of the algorithm results in obtaining values close to the global optimum while convergence speed will also improve significantly. The amount of search in the algorithm is related to the temperature and acceptance ratio so that the search process is optimized efficiently. In traditional SA algorithm, initial temperature determination is not related to the type of the problem and hence the search process is prolonged and in some cases the algorithm does not even converge to the desired optimum value. While applying SA algorithm, a reconciliation is achieved between accuracy and speed which is very important. In this study, to eliminate this drawback, the initial temperature has been related to the ratio of accepted states to all states at the start of the algorithm.
As mentioned above, in case SA algorithm follows the decreasing rate of the temperature according to the basic rate presented by (8), convergence of the algorithm is lengthened which in most control applications, employment of such a slow algorithm would be impossible. To resolve this problem, in this study, a dynamic Markov Chain has been applied which its length in each temperature is different and in proportion to that temperature.
Initial temperature and defining markov chain: Initial temperature plays a prominent role in the speed and convergence of SA algorithm so that provided the selected value of this factor is very high, the algorithm would be long-running. On the other hand, should this temperature be chosen very low, the accuracy of the algorithm in search process may decrease. Yip and Pao (1995) and Cho et al., (1998) selected initial temperature as 1000 and 0.5, respectively just as a constant value. Nevertheless, to increase the efficiency of SA algorithm in a wider range of applications, a rational balance tailored to the needs of the optimization problem should be kept between speed and accuracy. Therefore, generally steeper curves are utilized in which temperature is decreased faster to decrease running time of the algorithm. To accelerate reduction process, in most research works, linear reduction of temperature according to below relationships has been employed (Goffe et al., 1994):
$ T_{k+1}\ =\ \alpha \ast T_k\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ 0 \lt \alpha \lt 1 ~~~~~~~~~~~~~~~~~~~~~~(11)$
or
$ T_{k+1}\ =\ \frac{T_k\ }{1+\log(k)} ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~(12)$
On the other hand, changing temperature reduction curve results in a smaller range to be searched and may cause the algorithm to miss the optimum. To increase the search opportunity, in each temperature reduction step, a number of iterations for internal loop of the SA algorithm is considered for a given constant temperature which is called Markov chain. Indeed, Markov chain provides more chances for the algorithm while temperature is steady. To optimize the algorithm efforts in different temperature ranges and also determine length of Markov chain considering the type of optimization problem, dynamic Markov chain is defined.
Acceptance ratio, length of markov chain and dynamic markov chain: Concerning the fact that material's temperature establishes molecules’ movement capability, with increasing temperature, molecules gain more freedom and so entropy increases. In this study, to eliminate this problem, an optimum initial temperature is obtained at the beginning of the algorithm and increases from a small value according to the problem’s type. This increase continues as long as the ratio of number of accepted states to the total states $(\gamma\prime)$ along a Markov chain is equal to a defined ratio and in this very case the resultant temperature is equivalent to the melting point, i.e., initial temperature (Dashti et al., 2010). The operation utilized to find the initial value is the same as existing operation in the searching engine. First, the algorithm is started with a random variable and after producing a new variable, acceptance condition is examined and in case satisfies the condition, the new variable is substituted the previous value and this operation will continue until the end of Markov chain and finally $\gamma\prime$ is the ratio of number of accepted states to the total states (length of Markov chain). Provided this ratio is sufficient, continuing the algorithm in the loop will cease otherwise with increasing temperature and repeating abovementioned steps, new ratio $(\gamma\prime)$ will be calculated for increased temperature. This increase will carry on as long as the initial determined value for $\gamma$ in Markov chain is equal to its value in the algorithm.
Pao et al., (1999) and Thompson and Bilbro (2005) adopted a constant amount along length of Markov chain which implies the algorithm at all temperatures needed the same amount of effort, whereas SA algorithm requires different efforts at different temperatures. At high temperatures which entropy is high and molecules have more capability for movement, generally less appropriate responses are found. While, at low temperatures which acceptances are fewer and algorithm should converge, not so much effort is required. As a matter of fact, middle domain of temperature is the best range for the search process and most efforts should be made in this region which is algorithm’s effective domain.
In this study, a relationship has been established between length of Markov chain and temperature so that number of made efforts in the algorithm is proportional to its working temperature and thus most efforts for finding the optimum value are made in intermediate range of temperature. For this purpose, herein, length of Markov chain will be defined in proportion to number of acceptances occurred in the loop. Number of acceptances while the algorithm is running, could be decreased linearly or based on a curve. Maximum number of acceptances in Markov chain is indicative of its length. With decreasing length of Markov chain, number of iterations would increase according to the temperature reduction in the effective domain of the algorithm. Consequently, with defining dynamic Markov chain, required efforts for the search process are optimized and opportunities in the intermediate range, i.e., the effective range, will increase.
After passing the intermediate range of temperature, due to reduction of number of acceptances at low temperatures, number of efforts for searching will decrease and terms of convergence will be satisfied. In Markov chain, reduction factor of acceptance is linearly changed and its maximum value is regarded as 0.9. Procedure of decreasing temperature follows an exponential curve which in fact has three different domains. First domain is the initial section of the curve which has a steep slope. Second part is the intermediate range that is the effective domain of algorithm’s performance, in which slope of the curve decreases. Eventually, third part or final part is the one that satisfies terms of algorithm’s convergence in which temperature changes with a gentle slope. As a result, by defining dynamic length of Markov chain, it can be seen that the amount of algorithm’s effort will decrease and most efforts for searching would be done in the middle range. Thus, after passing the effective temperature, due to a significant reduction in maximum number of acceptances in the Markov chain and reaching the gentle slope of temperature’s curve, number of required efforts for obtaining the desired maximum acceptance will decrease considerably.
Proposed Control Strategy
Fuzzy systems have been recently employed for modelling and control of physical processes. These systems through their ability in developing a general but systematic frame for controlling nonlinear systems have attracted much of attention in different applications. Fuzzy logic controllers, due to their significant ability, have been made as one of the most favorite available tools for modelling and controlling nonlinear systems with complicated dynamics. In a fuzzy control system, controlling process is accomplished through a set of fuzzy rules. These rules govern fuzzy sets with definite membership functions.
In this research, a fuzzy controller optimized by MSA algorithm was considered to semi-actively control an MR damper. Indeed, in this approach, the command voltage to the MR damper is produced by this controller. Modified Simulated Annealing (MSA) algorithm is in charge of optimizing parameters of membership functions of fuzzy controller to minimize seismic-induced structural responses by commanding an optimal voltage to the MR damper. Figure 1 depicts a schematic diagram of the proposed MSA-FLC control system applied in this study.
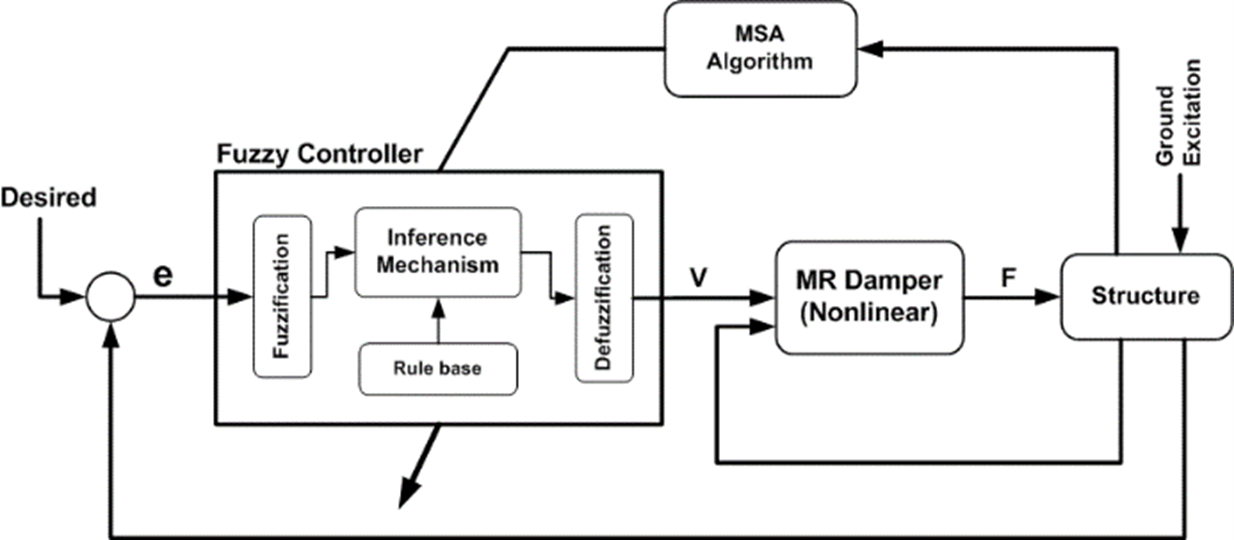
Fuzzy Logic Controller (FLC): A fuzzy system is a nonlinear mapping between crisp inputs and crisp outputs using fuzzy sets theory. The fuzzification block converts the crisp inputs to fuzzy sets, i.e., membership functions and the inference mechanism uses the fuzzy rules in the rule-base to produce fuzzy conclusions. Finally, the defuzzification block converts these fuzzy conclusions into crisp outputs.
In this study, effect, shape and parameters of membership functions have been investigated. In problems in which parameters of membership functions are examined, problem’s constraints cause corresponding matrix inequalities to exit from convex state while ordinary algorithms cannot be employed to search for their response anymore. Fuzzy control has no need of exact mathematical model of the problem and increasing resistance against uncertainties is its most prominent feature. However, fuzzy systems are incapable of completely presenting human knowledge in the form of fuzzy rules, hence controllers designed by fuzzy logic are not optimum necessarily. Thus, to obviate this drawback fuzzy systems are combined with evolutionary algorithms. But this combination, on the other hand, suffers from either non-convergence or early convergence. Proposed MSA algorithm can be an efficient approach to eliminate this obstacle. To fulfil this aim, in this investigation, a fuzzy controller optimized by the proposed MSA technique is introduced. A fuzzy controller generally consists of a set of rules which relate conditions of inputs to the outputs of the controller and fuzzy logic is a tool for processing these rules. Inputs of control rules include real variables such as measured responses of the process to be controlled, such as acceleration, velocity and relative displacement and desired amounts or set-points.
Fuzzy inference method developed by Mamdani and Assilian (1975) is the most commonly used fuzzy methodology. The approach proposed by them was among the first control systems developed using theory of fuzzy sets. They suggested as an attempt to control a steam engine and boiler combination by synthesizing a set of linguistic control rules obtained from experienced human operators. Their effort was based on research of Zadeh (1975) on fuzzy algorithms for complex systems and decision processes. After the aggregation process, there is a fuzzy set for each output variable that needs defuzzification.
In this study, an MR damper was utilized as the controlling mechanism and for determining the input voltage to the damper, a fuzzy controller based on the developed MSA algorithm which is herein called (MSA-FLC) controller is employed. To accomplish this aim, MSA technique is used to optimize the function of the system and establish membership function parameters of the fuzzy controller. Aim of this research is to design a structural vibration control system which reduces earthquake-induced structural responses including accelerations and displacements through controlling MR damper and resultant damages to the structure due to seismic forces are controlled and minimized. To satisfy desired requirements of the system equipped with MR damper, parameters of membership function utilized in the fuzzy controller are adjusted by the smart MSA algorithm and defining a proper cost function.
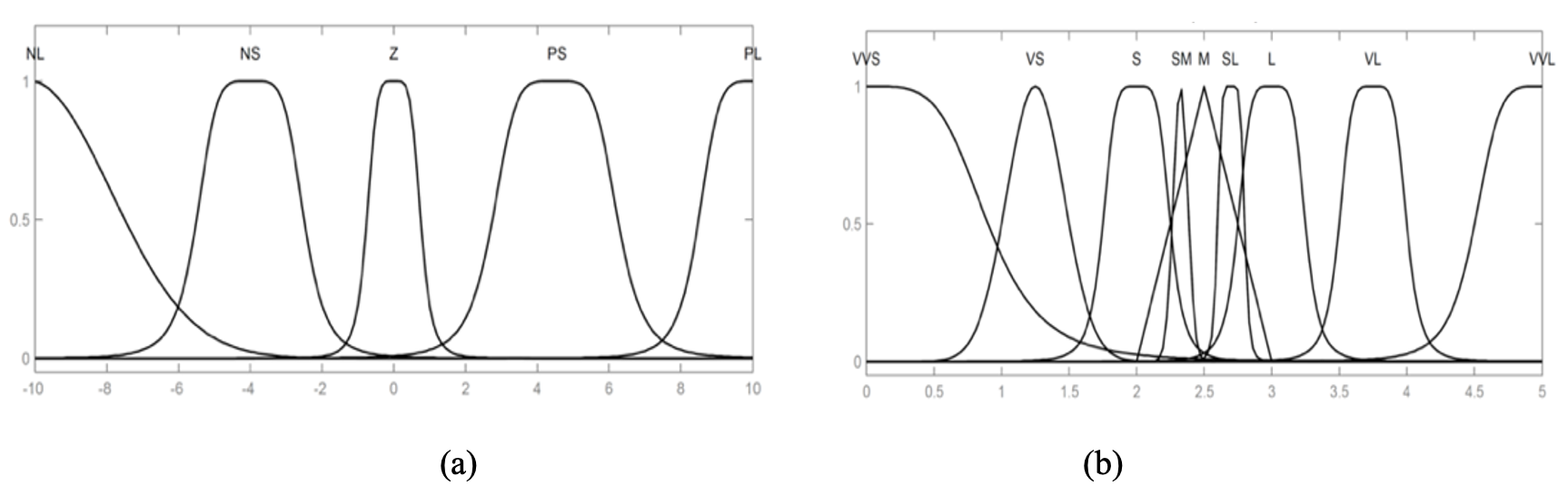
MSA-based Fuzzy Logic Controller (MSAFLC): From optimization point of view, a Fuzzy Logic Control (FLC) system can be divided into two parts of data base and rule base. The information of membership function parameters of input and output variables is stored in the data base and rule base includes a collection of fuzzy rules. Thus, there are four different states for optimization of an FLC system using evolutionary algorithms. This study aims to optimize data base of fuzzy controller using MSA algorithm to control seismic-induced vibrations of structures equipped with MR dampers. To design an optimal fuzzy system, membership functions and fuzzy rules should be defined appropriately. Various membership functions can be regarded for inputs and outputs of an FLC system which by changing their number and type, different responses can be obtained for the function of the system. In defining membership functions, each variable of inputs and outputs has been considered to be in the range of $[\begin{matrix}-10&10\\\end{matrix}]$ and $[\begin{matrix}0&5\\\end{matrix}]$, respectively. In designing fuzzy controllers, different membership functions including Triangular-shaped, Gaussian and Generalized bell-shaped can be employed for input and output variables. Generalized bell-shaped function is as follows (Verbruggen et al., 1999):
$ f(x;a,b,c)\ =\ \frac{1}{1+\left|\frac{x-c}{a}\right|^{2b}} ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~(13)$
where the parameters a and b vary the width of the curve and the parameter c locates the center of the curve. The parameter b should be positive. Triangular-shaped function is stated as bellow:
$ f(x;a,b,c)\ =\ \left\{ \begin{matrix} 0 & x \le a\\ \frac{x-a}{b-a} & a \le x \le b\\ \frac{c-x}{c-b} & b\le x\le c \\ 0 & c\le x\\ \end{matrix} \right\} ~~~~~~~~~~~~~~~~~~~~~~~~~~~~(14)$
The parameters a and c set the left and right sides or base points of the triangle. The parameter b sets the location of the vertex. Gaussian function is defined as:
$ f(x;\sigma,c)\ =\ e^\frac{-{(x-c)}^2}{{2\sigma}^2} ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~(15)$
which c is the average parameter and σ is the variation. Regarding the main aim of this study which is optimizing parameters of FLC to control the structure equipped with an MR damper, all three above-mentioned membership functions have been used. MSA algorithm, using modified techniques, makes a sensible compromise between accuracy and speed of the algorithm’s convergence. Steps to be taken in the proposed MSA algorithm have been presented in Table 1. By applying MSA algorithm and regulating its parameters according to Table 1, optimum parameters of membership functions for the fuzzy controller have been determined and given in Table 2.
In the next section, a numerical example is considered and obtained results using the proposed approach are presented to verify the performance of the proposed vibration control system which is based on fuzzy controller optimized by MSA technique for semi-active control of structures equipped with MR dampers to optimally mitigate seismic-induced structural responses.
| Step | Procedures to be taken |
|---|---|
| Step 1 | Determining optimal initial temperature according to variable producing mechanism of the algorithm main loop and in proportion to 20% acceptance with 100 times repetition range |
| Step 2 | Random determination of input variables of the problem (FLC parameters), defining initial values and reduction coefficient of neighborhood radius |
| Step 3 | Defining Dynamic Markov Chain in proportion to number of occurred acceptances which equals to the acceptance coefficient of initial temperature in internal loop iteration |
| Step 4 | Stochastic determination of new variables around previous accepted variables and in proportion to neighborhood radius |
| Step 5 | Determining cost function of new variables |
| Step 6 | Examining Metropolis acceptance conditions and determining current variables. |
| Step 7 | Determining maximum and minimum of internal loop, amount and vector of minimum variables of external loop |
| Step 8 | Returning to Step 4, in proportion to definition of Dynamic Markov Chain (Step 3), in case iteration of internal loop is not complete |
| Step 9 | A 90% reduction in Dynamic Markov Chain (required number of acceptances for internal loop iteration) |
| Step 10 | Determining new temperature based on Eq. (12) |
| Step 11 | Examining stop condition in search procedure of internal loop as a convergence condition of the algorithm and getting back to Step 4, if the convergence condition is not satisfied |
| Membership function | Type | Parameters | ||
|---|---|---|---|---|
| Input (Error), Range [-10,10] | ||||
| NL | Gaussian | 2.26 | -10.14 | |
| NS | Generalized bell-shaped | 1.46 | 2.65 | -4.33 |
| Z | Generalized bell-shaped | 0.73 | 2.64 | 0 |
| PS | Generalized bell-shaped | 1.69 | 2.53 | 4.48 |
| PL | Generalized bell-shaped | 1.68 | 2.91 | 10.22 |
| Output (Voltage), Range [0,5] | ||||
| VVS | Generalized bell-shaped | 0.95 | 2.37 | -0.06 |
| VS | Gaussian | 0.21 | 1.23 | |
| S | Generalized bell-shaped | 0.27 | 2.81 | 1.95 |
| SM | Gaussian | 0.06 | 2.33 | |
| M | Triangular-shaped | 2.10 | 2.49 | 2.98 |
| SL | Generalized bell-shaped | 0.1 | 3.13 | 2.71 |
| L | Generalized bell-shaped | 0.24 | 2.53 | 3.02 |
| VL | Generalized bell-shaped | 0.26 | 2.54 | 3.78 |
| VVL | Generalized bell-shaped | 0.53 | 2.66 | 5.03 |
Results And Discussion
A simple model of the scaled, three-story, test-structure, described in Wang (1994), Dyke et al., (1996) and Kim et al., (2009), which has been used in previous active control studies at the Structural Dynamics and Control/Earthquake Engineering Laboratory (SDC/EEL) at the University of Notre Dame, has been considered for numerical simulations to verify and examine the effectiveness of the designed control system. In this model elastic stiffness, mass and damping of stories are as follows:
$ M_1\ =\ M_2\ =\ M_3\ =\ 98.3 kg,\ k_1 = 5.16\times10^5 N/m, $
$k_2\ =\ k_3\ =\ 6.84 N/m,\ C_1\ =\ 125 N.sec/m,\ C_2\ =\ C_3\ =\ 50 N.sec/m $
This test structure was designed to be a scale model of the prototype building discussed in Zhou et al., (2012). This structure was modelled as a shear frame with linear behavior configured with a single MR damper which is rigidly connected between the ground and the first floor of the structure. The model of the structure was subjected to the full-scale El Centro (1940, PGA = 0.349g) earthquake. Since the considered structure is a scaled model, this record was reproduced at five times the recorded rate. The model of the structure equipped with MR damper as the semi-active mechanism and fuzzy controller optimized with MSA algorithm as the selected controller were implemented in MATLAB. Modified Bouc-Wen model was considered for modelling dynamics of MR damper while its parameters were selected based on the identified model of a shear-mode prototype MR damper presented by Dyke et al., (1996) as follows:
$ α_a\ =\ 140\ N/cm,\ α_b\ =\ 695\ N/cm.V,\ γ\ =\ 363\ cm^{-2}, $
$ β\ =\ 363\ cm^{-2},\ A\ =\ 301,\ n\ =\ 2,\ η\ =\ 190\ sec^{-1} $
$ C_{oa}\ =\ 21\ N.sec/cm,\ C_{ob}\ =\ 3.5\ N.sec/cm.V,\ k_o\ =\ 46.9\ N/cm, $
$ C_{1a}\ =\ 283\ N.sec/cm,\ C_{1b}\ =\ 2.95\ N.sec/cm.V,\ k_1\ =\ 5\ N/cm, x_o\ =\ 14.3\ cm $
Forces of up to 3000 N with maximum command voltage $V_{max} = 2.25 V$ can be generated with the device. In Table 2, values of input and output membership functions of control system along with their types and amounts of parameters have been presented. Indeed, input of fuzzy controller is the error between the desired and real values and its output is the commanded voltage sent to the current driver. Error membership functions have five curves including NL, NS, Z, PS and PL presented in Table 2 and shown in Fig. 2a as well as obtained parameters from MSA algorithm. To obtain a better accuracy in producing output voltage by FLC, its membership functions includes 9 curves as VVS, VS, S, SM, M, SL, L, VL and VVL depicted in Fig. 2b. Each of these functions has been selected from one of the before-mentioned membership functions. In designing this fuzzy controller, Mamdani’s fuzzy inference (Mamdani and Assilian, 1975), Min inference engine (Wang, 1997), Mamdani’s minimum implication, Minimum T-norm and Centroid based defuzzification have been employed.
The maximum structural responses to the considered earthquake excitations are presented in Table 3. In this Table, Dis. is the displacement of the ith floor relative to the ground, Drift is the inter story drift (i.e., $x_{i^-} x_{i-1}$) and Acc. is the absolute acceleration of the ith floor and f is the applied control force. Results of conducted simulations have been compared by that of other researchers to verify the proposed methodology and demonstrate its efficiency. Results of simulating the system in two modes of Passive-on and Passive-off have also been presented for performance comparison purposes. According to Table 3, using MSA-FLC technique, the peak first floor relative displacement has decreased by 85% of the uncontrolled value which is the most reduction compared to that of other controllers mentioned in this table. Proposed MSA-FLC method has also reduced the first-floor absolute acceleration of the uncontrolled structure by an additional 24%, compared to the corresponding value obtained by GAF approach. The same reduction for the case of SNFC technique has raised to 200%, which is substantial. To estimate the efficiency of the proposed technique, results obtained by the fuzzy controller based on the traditional SA algorithm have also been presented in Table 3.
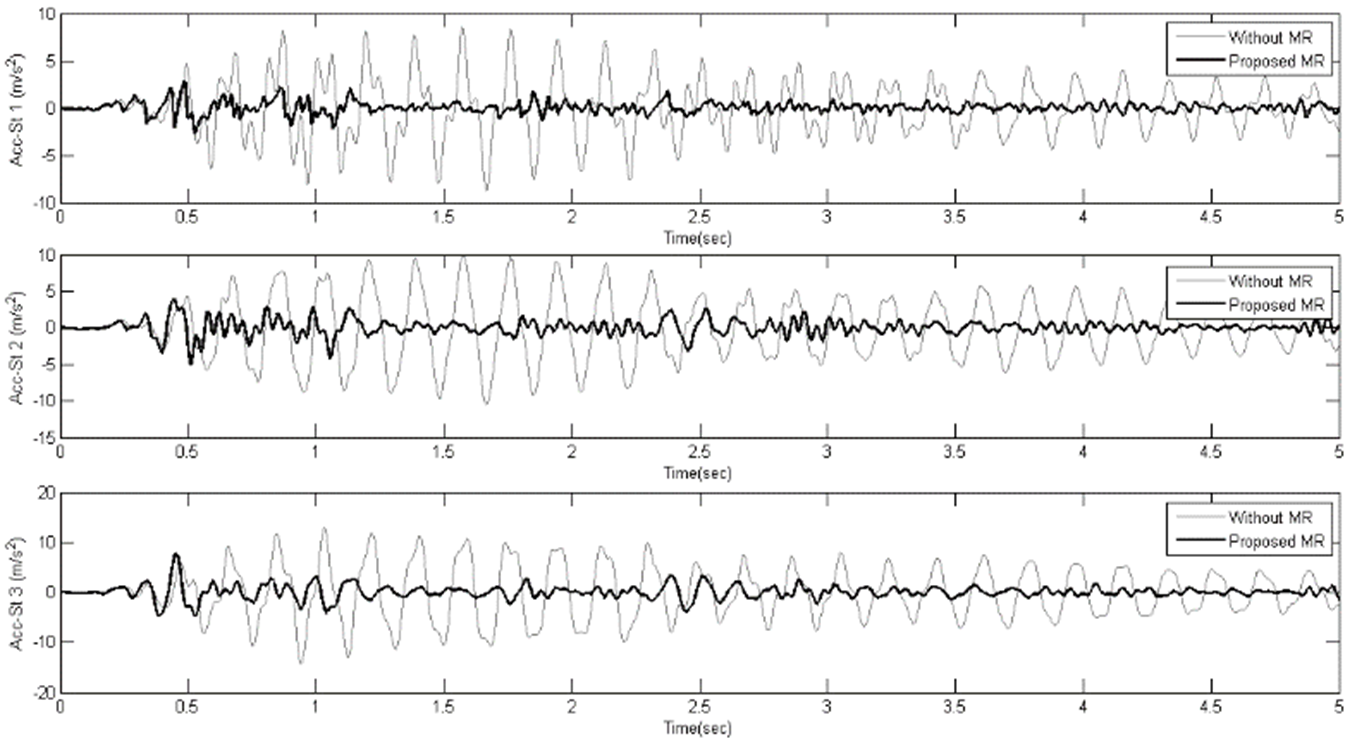
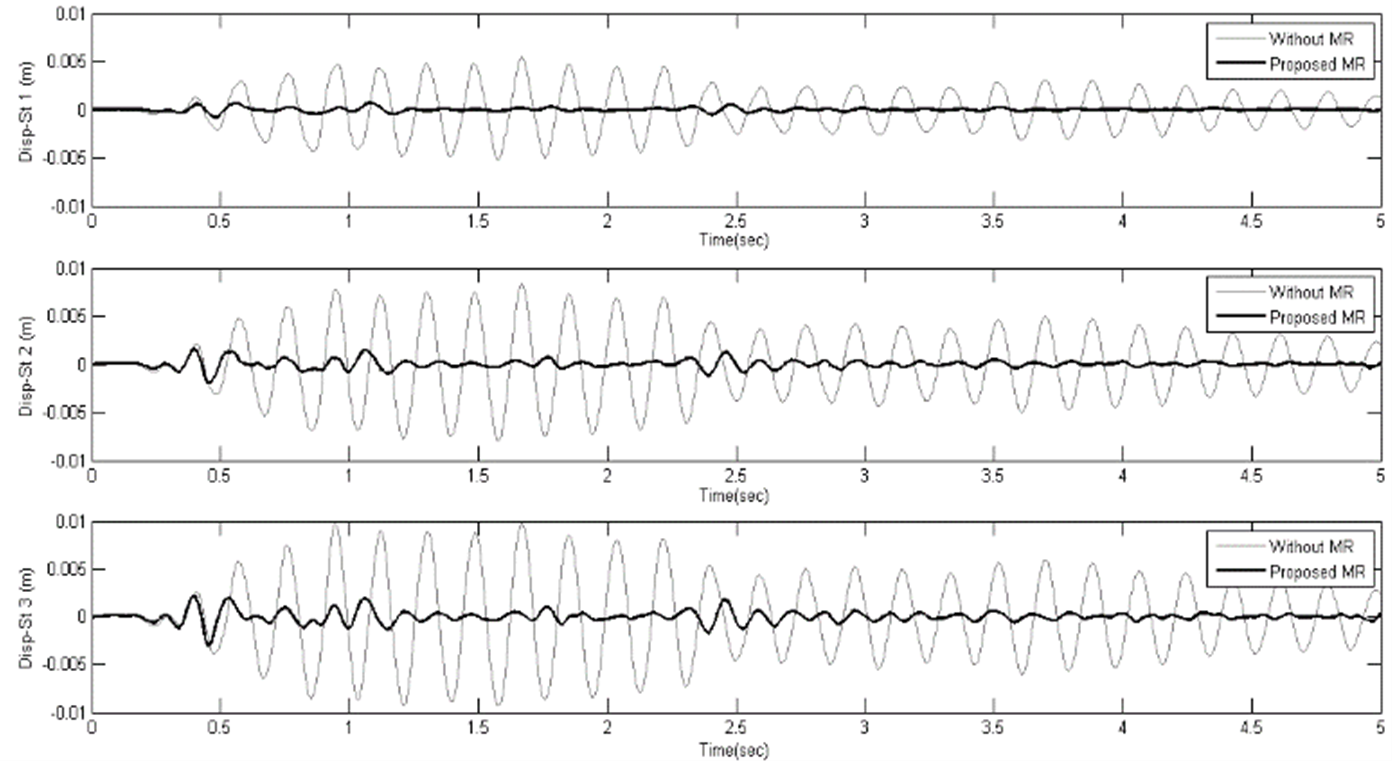
It is obvious from Table 3, that proposed MSA-FLC technique has decreased accelerations of all stories more effectively than SNFC approach. MSA-FLC system has also reduced the second-floor absolute acceleration of the structure 21% more than SNFC method. It is worth mentioning that the main focus in designing the proposed controller in this research has been on simultaneous minimization of absolute accelerations of all stories and error function. Figure 3 and 4 show acceleration and relative displacement time histories of all stories of the controlled structure using the proposed technique superimposed on the corresponding responses of the uncontrolled case, for first 5 seconds of the excitation record while Fig. 5 depicts the MR damper’s force using the commanded voltage produced by the MSA-FLC controller.
| Story | Dis. (cm) | Drift (cm) | Acc. (cm/s2) | f (N) |
|---|---|---|---|---|
| Strategy | Uncontrolled structure | |||
| 1 | 0.538 | 0.538 | 856 | - |
| 2 | 0.820 | 0.319 | 1030 | |
| 3 | 0.962 | 0.201 | 1400 | |
| Strategy | Passive-Off | |||
| 1 | 0.211 | 0.211 | 420 | 258 |
| 2 | 0.357 | 0.153 | 480 | |
| 3 | 0.455 | 0.103 | 717 | |
| Strategy | Passive-On | |||
| 1 | 0.076 | 0.076 | 281 | 979 |
| 2 | 0.196 | 0.158 | 494 | |
| 3 | 0.306 | 0.110 | 767 | |
| Strategy | Clipped-optimal controller (H2/LQG+COC) (Dyke et al., 1996) | |||
| 1 | 0.114 | 0.114 | 696 | 941 |
| 2 | 0.185 | 0.090 | 739 | |
| 3 | 0.212 | 0.101 | 703 | |
| Strategy | GAF (Yan and Zhou, 2006) | |||
| 1 | 0.100 | 0.100 | 499 | 867 |
| 2 | 0.169 | 0.120 | 586 | |
| 3 | 0.255 | 0.102 | 709 | |
| Strategy | SNFC (Kim et al., 2009) | |||
| 1 | 0.112 | 0.112 | 577 | 798 |
| 2 | 0.169 | 0.109 | 722 | |
| 3 | 0.212 | 0.099 | 817 | |
| Strategy | SA-FLC | |||
| 1 | 0.110 | 0.110 | 503 | 898 |
| 2 | 0.180 | 0.090 | 581 | |
| 3 | 0.260 | 0.100 | 821 | |
| Strategy | Proposed MSA-FLC | |||
| 1 | 0.079 | 0.079 | 287 | 1001 |
| 2 | 0.197 | 0.160 | 504 | |
| 3 | 0.309 | 0.113 | 785 | |

Conclusion
In this study, an MR damper as a semi-active mechanism with non-linear dynamics modelled by modified Bouc-Wen mechanical model was employed to semi-actively control seismic vibrations of a 3-story shear frame with linear behavior. To optimally control this damper, a fuzzy controller integrated with a Modified Simulated Annealing (MSA) optimization algorithm was applied. The objective function for the optimized fuzzy controller was set to minimize absolute accelerations of all stories. Considering the fact that parameters of a nonlinear fuzzy controller play an essential role in improving the response of the system, these parameters were properly determined using MSA technique as a meta-heuristic approach widely used for optimization purposes. MSA algorithm was actually employed to determine parameters of the membership functions of the fuzzy controller optimally. Results of the numerical simulations verified and demonstrated the efficiency of the proposed smart strategy through a comparison with other proposed techniques by other studies, including Semi-active Nonlinear Fuzzy Controller (SNFC), Genetic Adaptive Fuzzy controller (GAF), $H_2/LQG$ integrated with Clipped-optimal algorithm $(H_2/LQG+COC)$ and traditional-SA-based fuzzy controller as well, for mitigation and control of structural vibrations especially in terms of maximum relative displacement and absolute acceleration of the story which contains the damper. The proposed technique showed a higher efficiency over other strategies in reducing peak absolute accelerations of first and second floor of the structure, more effectively. It is suggested for future investigations to apply the proposed approach in this study for different configurations of the MR damper for multi-objective control of structures with hysteretic nonlinear behavior, subjected to far field and near field excitations to examine the effect of earthquake frequency content as well as structural nonlinearities on the efficiency of the proposed technique.
Author Details
1Electrical Engineering Department, Amirkabir University of Technology (AUT), Tehran, Iran
2Civil Engineering Department, University of Mohaghegh Ardabili (UMA), Ardabil, Iran
References
Battaini, M., F. Casciati and L. Faravelli, 1998. Fuzzy control of structural vibration. An active mass system driven by a fuzzy controller. Earthq. Eng. Struct. D., 27: 1267-1276.
Chang, C.C. and L. Zhou, 2002. Neural network emulation of inverse dynamics for a magnetorheological damper. J. Struct. Eng., 128: 231-239.
Cho, H.J., S.Y. Oh and D.H. Choi, 1998. Population-oriented simulated annealing technique based on local Temperature concept. Electron. Lett., 34(3): 312-313.
Dashti, J.M., G.K. Shojaee, S.M.H. Seyedkashi and T.M. Behnam, 2010. Novel simulated annealing algorithm in order to optimal adjustment of digital PID controller. Proceeding of 11th International Conference on Control, Automation, Robotics and Vision, Singapore, pp: 1766-1771.
Dyke, S.J., B.F. Spencer Jr., M.K. Sain and J.D. Carlson, 1996. Modeling and control of magnetorheological dampers for seismic response reduction. Smart Mater. Struct., 5: 565-575.
Esteki, K., A. Bagchi and R. Sedaghati, 2015. Semi-active control of seismic response of a building using MR fluid-based tuned mass damper. Smart Struct. Syst., 16(5): 807-833.
Goffe, W.L., G.D. Ferrier and J. Rogers, 1994. Global optimization of statistical functions with simulated annealing. J. Econometrics, 60: 65-99.
Gu, Z.Q. and S.O. Oyadiji, 2008. Application of MR damper in structural control using ANFIS method. Comput. Struct., 86: 427-436.
Henderson, D., S.H. Jacobson and A.W. Johnson, 2003. The Theory and Practice of Simulated Annealing. In: Glover, F. and G.A. Kochenberger (Eds.), Handbook of Metaheuristics. International Series in Operations Research & Management Science, Springer, Boston, MA, Vol. 57.
Huang, H., J. Liu and L. Sun, 2015. Full-scale experimental verification on the vibration control of stay cable using optimally tuned MR damper. Smart Struct. Syst., 16(6): 1003-1021.
Kim, Y., R. Langari and S. Hurlebaus, 2009. Semiactive nonlinear control of a building with a magnetorheological damper system. Mech. Syst. Signal Pr., 23: 300-315.
Kirkpatrick, S., C.D. Gelatt Jr. and M.P. Vecchi, 1983. Optimization by simulated annealing. Science, 220(4598): 671-680.
Liu, A., J. Wang, G. Han, S. Wang and J. Wen, 2006. Improved simulated annealing algorithm solving for 0/1 knapsack problem. Proceeding of the 6th International Conference on Intelligent Systems Design and Applications. Jinan, China, 2: 1159-1164.
Makhmalbaf, M.O., M.A. Tutunchian and M.Z. Samani 2011. Optimized fuzzy logic controller for semi-active control of buildings using particle swarm optimization. Adv. Mater. Res., 255-260: 2505-2509.
Mamdani, E.H. and S. Assilian, 1975. An experiment in linguistic synthesis with a fuzzy logic controller. Int. J. Man-Mach. Stud., 7(1): 1-13.
Metropolis, N., A.W. Rosenbluth, M.N. Rosenbluth, A.H. Teller and E. Teller, 1953. Equation of state calculations by fast computing machines. J. Chem. Phys., 21: 1087-1092.
Pao, D.C.W., S.P. Lam and A.S. Fong, 1999. Parallel implementation of simulated annealing using transaction processing. IEE P-Comput. Dig. T., 146: 107-113.
Schurter, K.C. and P.N. Roschke, 2000. Fuzzy modeling of a magnetorheological damper using ANFIS. Proceeding of 9th IEEE International Conference on Fuzzy Systems. San Antonio, TX, USA, pp: 122-127.
Schurter, K.C. and P.N. Roschke, 2001. Neuro-fuzzy control of structures using magnetorheological dampers. Proceeding of the American Control Conference. Arlington, Virginia, USA, pp: 1097-1102.
Shakouri, G.H., K. Shojaee and T.M. Behnam, 2009. Investigation on the choice of the initial temperature in the simulated annealing: A mushy state SA for TSP. Proceeding of 17th Mediterranean Conference on Control and Automation. Thessaloniki, Greece, pp: 1050-1055.
Sheikh, M.N., J. Xiong and W.H. Li, 2012. Reduction of seismic pounding effects of base-isolated RC highway bridges using MR damper. Struct. Eng. Mech. 41(6): 791-803.
Siarry, P., G. Berthiau, F. Durbin and J. Haussy, 1997. Enhanced simulated annealing for globally minimizing functions of many-continuous variables. ACM T. Math. Software, 23(2): 209-228.
Spencer, B.F., S.J. Dyke, M.K. Sain and J.D. Carlson, 1997. Phenomenological model of a magnetorheological damper. J. Eng. Mech., 123: 230-238.
Symans, M.D. and S.W. Kelly, 1999. Fuzzy logic control of bridge structures using intelligent semi-active seismic isolation systems. Earthq. Eng. Struct. Dynam., 28: 37-60.
Thompson, D.R. and G.L. Bilbro, 2005. Sample-sort simulated annealing. IEEE T. Syst. Man Cy. B, 35(3): 625-632.
Ventresca, M. and H.R. Tizhoosh, 2007. Simulated annealing with opposite neighbors. Proceeding of IEEE Symposium on Foundations of Computational Intelligence. Honolulu, Hawaii, USA, pp: 186-192.
Verbruggen, H.B., H.J. Zimmermann and R. Babuska, 1999. Fuzzy Algorithms for Control. Kluwer Academic Publishers, Springer, Netherlands.
Wang, L.X., 1994. Adaptive Fuzzy Systems and Control: Design and Stability Analysis. Prentice-Hall, Inc., Englewood Cliffs, NJ, USA.
Wang, L.X., 1997. A Course in Fuzzy Systems and Control. Prentice Hall Inc., PTR, Division of Simon and Schuster One Lake Street Upper Saddle River, NJ, United States.
Wen, Y.K., 1976. Method for random vibration of hysteretic systems. J. Eng. Mech. Div., 102: 249-263.
Wilson, C.M.D., 2012. Effects of multiple MR dampers controlled by fuzzy-based strategies on structural vibration reduction. Struct. Eng. Mech., 41(3): 349-363.
Yan, G. and L.L. Zhou, 2006. Integrated fuzzy logic and genetic algorithms for multi-objective control of structures using MR dampers. J. Sound Vib., 296: 368-382.
Yip, P.P.C. and Y.H. Pao, 1995. Combinatorial optimization with use of guided evolutionary simulated annealing. IEEE T. Neural Networ., 6: 290-295.
Yoshida, O. and S.J. Dyke, 2004. Seismic control of a nonlinear benchmark building using smart dampers. J. Eng. Mech., 130: 386-392.
Yuen, S.Y. and C.K. Chow, 2008. A non-revisiting simulated annealing algorithm. Proceeding of IEEE Congress on Evolutionary Computation. Hong Kong, China, pp: 1886-1892.
Zadeh, L.A., 1975. Outline of a new approach to the analysis of complex systems and decision processes. IEEE T. Syst. Man Cyb., 3: 28-44.
Zhou, L. and C.C. Chang, 2003. Optimal control of vibration using MR dampers. J. Vib. Eng., 15: 109-113.
Zhou, L., C.C. Chang and L.X. Wang, 2003. Adaptive fuzzy control for nonlinear building-magnetorheological damper system. J. Struct. Eng., 129: 905-913.
Zhou, Z., S.P. Meng, J. Wu and Y. Zhao, 2012. Semi-active control on long-span reticulated steel structures using MR dampers under multi-dimensional earthquake excitations. Smart Struct. Syst., 10(6): 557-572.
Rights and permissions
Open Access: This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third-party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/
Cite this Article
Mohammad Dashti Javan, Seyed Ehsan Aghakouchaki Hosseini and Mohammad Bagher Menhaj, 2020. A Metaheuristic-based Fuzzy Controller for Semi-active Control of Magnetorheological Dampers. Research Journal of Applied Sciences, Engineering and Technology 17: 94-105. http://doi.org/10.19026/rjaset.17.6046
Received
Accepted
Published
January 6, 2020
March 6, 2020
June 15, 2020
DOI: http://doi.org/10.19026/rjaset.17.6045
Sections
Abstract
Keywords
Introduction
Materials and Methods
Simulated Annealing Algorithm
Modified Simulated Annealing (MSA) Algorithm
Initial temperature and defining markov chain
Acceptance ratio, length of markov chain and dynamic markov chain
Proposed Control Strategy
Fuzzy Logic Controller (FLC)
MSA-based Fuzzy Logic Controller (MSAFLC)
Results And Discussion
Conclusion
Author Details
References
Rights And Permissions
Cite This Article